Los investigadores del SINTEF Ocean y de NTNU publicaron un estudio donde se explora una década de investigación realizada en SINTEF ACE, un laboratorio de acuicultura a escala industrial. Al compartir las lecciones aprendidas y las perspectivas futuras, los investigadores esperan despertar un mayor interés en el uso de la robótica, una tecnología con un inmenso potencial para revolucionar la acuicultura.
El estudio toma como ejemplo Noruega. Desde la década de 1970, su industria acuícola ha experimentado un auge, convirtiéndose en su segunda exportación más importante después del petróleo y el gas. El salmón del Atlántico es su principal actor y prospera en piscifactorías flotantes a lo largo de la costa.
Los peces suelen criarse en grandes jaulas de red a lo largo de la costa o en mar abierto. Estas jaulas, expuestas al oleaje y las corrientes, requieren un seguimiento y mantenimiento constante. Tradicionalmente, los buzos realizaban estas tareas, pero este método es arriesgado y costoso. Además, las regulaciones más estrictas y la falta de sitios costeros adecuados están empujando a las piscifactorías a alejarse de la costa, donde las condiciones climáticas son más duras.
- 1 Vehículos submarinos no tripulados (UUV) al rescate
- 2 El auge de la piscicultura autónoma
-
3
Desafíos de la robótica submarina en la acuicultura
- 3.1 Problemas ambientales: un lugar de trabajo duro
- 3.2 No toda la tecnología es igual: el caso del posicionamiento submarino
- 3.3 Registradores de velocidad Doppler (DVL) e inspección de redes
- 3.4 El desafío de la visibilidad bajo el agua
- 3.5 Mantener la “línea de vida” del robot
- 3.6 Compartiendo el espacio: robots y peces
- 3.7 La seguridad es lo primero: el diseño del robot importa
- 4 Conclusión
- 5 Entradas relacionadas:
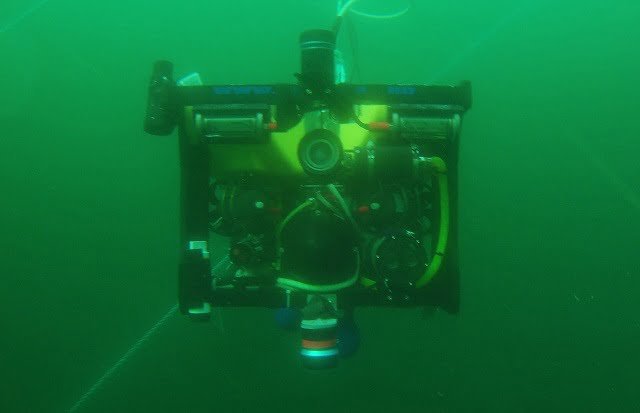
Vehículos submarinos no tripulados (UUV) al rescate
Las preocupaciones de seguridad y las regulaciones más estrictas en las operaciones de las granjas salmoneras están empujando a la industria hacia los vehículos submarinos no tripulados (UUV), como los vehículos operados a distancia (ROV). Estos ROV son como robots submarinos, controlados por humanos desde la superficie.
Los ROV se han convertido en un pilar para los salmoneros noruegos, abordando tareas como:
- Limpieza de redes: Mantener las redes libres de bioincrustaciones (organismos acuáticos que se acumulan) es crucial para la salud de los peces. Los ROV pueden eliminar de manera eficiente a estos autoestopistas no deseados.
- Inspecciones de líneas de amarre: El anclaje seguro de las jaulas de red es vital. Los ROV pueden inspeccionar meticulosamente estas líneas en busca de desgaste.
- Monitoreo de peces: Vigilar la salud y el bienestar de los peces es primordial. Los ROV proporcionan información valiosa para los piscicultores.
El auge de la piscicultura autónoma
Sin embargo, las operaciones con ROV son caras y arriesgadas. Por eso los investigadores están desarrollando ROV autónomos, capaces de funcionar sin control humano constante. Esto se alinea perfectamente con el concepto de piscicultura de precisión (PFF). PFF tiene como objetivo reemplazar las operaciones manuales con toma de decisiones basada en datos y robots autónomos.
Imagine ROV navegando de forma autónoma a través de las jaulas de red, utilizando sensores avanzados para detectar incluso el agujero más pequeño. La investigación está en curso y los proyectos se centran en:
- Inspección de redes autoguiada: Uso de sensores y cámaras para encontrar y evaluar de forma autónoma la integridad de la red.
- Navegación inteligente: Equipar jaulas de red con ayudas de navegación para ayudar a los ROV a moverse libremente.
- Limpiadores robóticos de redes: Los investigadores han desarrollado robots que puedan arrastrarse a lo largo de las redes y eliminar la acumulación de bioincrustaciones.
Desafíos de la robótica submarina en la acuicultura
Los robots submarinos tienen un inmenso potencial para revolucionar la acuicultura. Pero como cualquier tecnología nueva, existen desafíos que superar. Comprender estos desafíos allana el camino para mejores diseños de robots y operaciones más fluidas.
Problemas ambientales: un lugar de trabajo duro
El mundo submarino es implacable. Las fuertes corrientes dificultan el control de los robots. La comunicación se ve obstaculizada por el agua, que debilita las señales. La corrosión del agua salada puede destruir el equipo. Incluso el clima impredecible obstaculiza las operaciones, aumentando los riesgos de seguridad y limitando las ventanas de oportunidad.
Mantente siempre informado
Únete a nuestras comunidades para recibir al instante las noticias, informes y análisis más importantes del sector acuícola.
No toda la tecnología es igual: el caso del posicionamiento submarino
Se supone que los sistemas de posicionamiento acústico (USBL) señalan la ubicación de un robot. Sin embargo, los investigadores han encontrado inconsistencias. A veces, USBL funciona perfectamente. Otras veces, las señales son débiles o poco fiables. Esto parece deberse a la forma en que el sonido rebota y se dispersa bajo el agua.
¿La conclusión clave?
Ajustar la configuración de USBL para cada entorno, comenzando con baja potencia y aumentándola gradualmente para obtener una intensidad de señal óptima. Además, debes estar preparado para las caídas de señal, por lo que los robots necesitan sistemas de respaldo sólidos.
Registradores de velocidad Doppler (DVL) e inspección de redes
Los registradores de velocidad Doppler (DVL) han demostrado ser útiles para medir la velocidad y la distancia de un robot en relación con la red de pesca. Al aumentar la potencia de transmisión, los DVL pueden lograr un «bloqueo de red», proporcionando lecturas precisas cuando la visión del sensor no está obstruida por peces. Incluso cuando los bancos de peces se interponen en el camino, se pueden identificar y descartar los valores atípicos. Sin embargo, los DVL solo funcionan cerca de la red (a menos de 5 metros) y no pueden usarse en el fondo marino.
El desafío de la visibilidad bajo el agua
La acuicultura presenta desafíos únicos para las cámaras submarinas. Los desechos de pescado y el alimento no consumido pueden enturbiar el agua. Trabajar cerca de la superficie introduce otra variable: la luz solar brillante. Estos factores afectan significativamente la calidad de la imagen. Por ejemplo, los investigadores que probaron un método de triangulación con cámara láser para la localización tuvieron éxito inicialmente. Sin embargo, las pruebas posteriores fracasaron porque la claridad del agua había disminuido. Lección aprendida: las cámaras submarinas requieren una cuidadosa consideración de la calidad del agua y las condiciones de iluminación.
Mantener la “línea de vida” del robot
Manejar la cuerda, la línea de vida que conecta el robot con la superficie, es una tarea exigente, especialmente fuera de la jaula de red. Los entornos de las piscifactorías están llenos de complejos sistemas de amarre, líneas eléctricas y líneas de alimentación. Si bien es posible realizar inspecciones fuera de la red, requieren una vigilancia constante para evitar enredos en las correas. A menudo, es mejor dividir las inspecciones en segmentos con menos cables y cuerdas. Un estudio incluso documentó un enredo de la correa causado por un aumento repentino de corriente cuando el ROV no estaba supervisado.
Compartiendo el espacio: robots y peces
Dentro de la jaula de red, los riesgos de enredo son menores, pero el funcionamiento del robot requiere un enfoque cuidadoso para no molestar a los peces. Los movimientos rápidos pueden asustar a los peces y causarles estrés. Curiosamente, los estudios sugieren que los peces pueden incluso aprender a evitar áreas donde los robots operan con frecuencia.
La seguridad es lo primero: el diseño del robot importa
El diseño del robot debe priorizar minimizar el daño a la red y a los peces. Los bordes afilados y las herramientas no están permitidos, ya que pueden romper la red. Del mismo modo, las jaulas para propulsores son esenciales para evitar que los peces queden atrapados en las hélices.
Al reconocer estos desafíos e implementar las lecciones aprendidas, los investigadores e ingenieros pueden continuar desarrollando mejores robots submarinos para una acuicultura sostenible y eficiente.
Conclusión
El estudio presenta los hallazgos de los experimentos de una década realizados en SINTEF ACE. Los investigadores discutieron las lecciones aprendidas y las perspectivas futuras de la robótica de la acuicultura, un campo con inmenso potencial para revolucionar la industria salmonera.
El estudio fue financiado por Research Council of Norway (RCN), SFI Exposed Center for Research-based Innovation y por fondos de SINTEF RACE.
Referencia (acceso abierto)
Amundsen, H. B., Xanthidis, M., Føre, M., Ohrem, S. J., & Kelasidi, E. (2024). Aquaculture field robotics: Applications, lessons learned and future prospects. arXiv preprint arXiv:2404.12995.
Editor de la revista digital AquaHoy. Biólogo Acuicultor titulado por la Universidad Nacional del Santa (UNS) y Máster en Gestión de la Ciencia y la Innovación por la Universidad Politécnica de Valencia, con diplomados en Innovación Empresarial y Gestión de la Innovación. Posee amplia experiencia en el sector acuícola y pesquero, habiendo liderado la Unidad de Innovación en Pesca del Programa Nacional de Innovación en Pesca y Acuicultura (PNIPA). Ha sido consultor senior en vigilancia tecnológica, formulador y asesor de proyectos de innovación, y docente en la UNS. Es miembro del Colegio de Biólogos del Perú y ha sido reconocido por la World Aquaculture Society (WAS) en 2016 por su aporte a la acuicultura.

: Guía completa de cuidados, acuario, alimentación, reproducción y enfermedades")

: Tecnología, Diseño y Rentabilidad")




