La inspección regular de las redes en las jaulas de acuicultura es una tarea fundamental pero desafiante. Garantizar la integridad estructural para evitar escapes, controlar el biofouling y asegurar la salud de los peces exige un monitoreo constante que, tradicionalmente, ha dependido de buzos o del control manual de Vehículos Operados Remotamente (ROVs). Estos métodos no solo son costosos y laboriosos, sino que también son propensos a errores y ofrecen una adaptabilidad limitada a las dinámicas condiciones submarinas.
Para abordar estos desafíos, un grupo de investigadores de la Khalifa University ha desarrollado AquaChat, un novedoso sistema que integra Modelos de Lenguaje Grandes (LLMs) —la misma tecnología detrás de herramientas como ChatGPT— para crear una forma más inteligente, flexible y eficiente de inspeccionar las jaulas marinas. Este avance que integra la inteligencia artificial en las operaciones acuícolas permite que los operadores simplemente «conversen» con el ROV para que este realice tareas de inspección complejas de manera autónoma y adaptativa.
Conclusiones clave
- AquaChat permite a los operadores dar instrucciones a los ROVs usando lenguaje natural (ej. «inspecciona la jaula en busca de agujeros»), eliminando la necesidad de programación compleja.
- El sistema utiliza un Modelo de Lenguaje Grande (LLM), como GPT-4, para crear y ajustar dinámicamente los planes de inspección en tiempo real, respondiendo a imprevistos como obstáculos o baja visibilidad.
- Las pruebas demuestran que el planificador de AquaChat es mucho más flexible y comprende una gama más amplia de comandos (estructurados y no estructurados) que los sistemas tradicionales basados en reglas fijas.
- El sistema demostró una alta precisión en el seguimiento de trayectorias de inspección tanto en simulaciones como en pruebas físicas, asegurando una cobertura completa y eficiente de la estructura de la red.
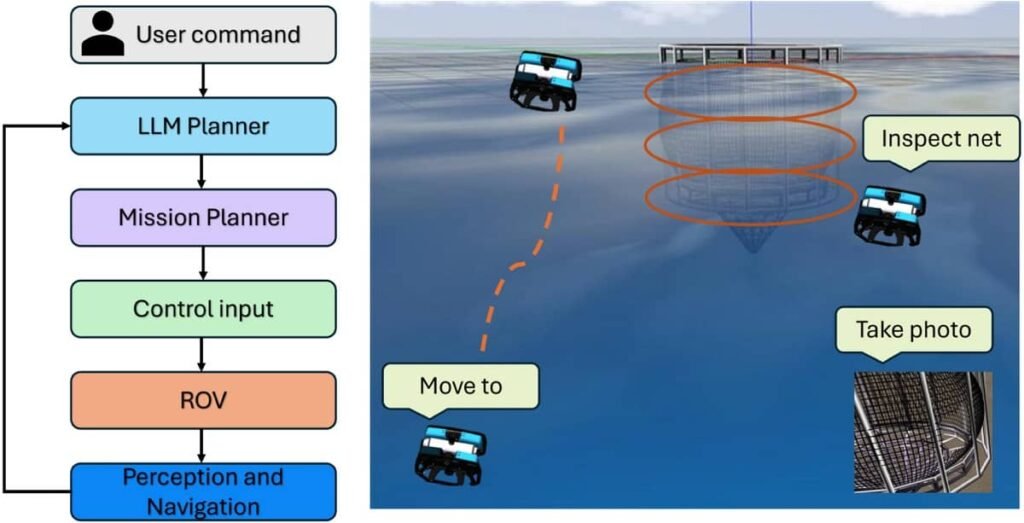
¿Cómo funciona AquaChat? Una arquitectura de tres capas
El secreto de AquaChat radica en su arquitectura multicapa, diseñada para traducir comandos simples en lenguaje natural a acciones precisas del ROV en el agua.
El planificador de alto nivel: el cerebro conversacional
En la capa superior se encuentra el planificador basado en LLM, que utiliza el modelo GPT-4 de OpenAI. Cuando un operador introduce un comando como «Inspecciona la jaula completa usando un método en espiral a 3 metros de distancia», el LLM no solo entiende la solicitud, sino que la descompone en un plan de acción simbólico. Este plan considera el contexto del entorno, como las dimensiones de la jaula y las capacidades del ROV, para generar una secuencia lógica de tareas: moverse_a, inspeccionar y capturar_imagen.
El gestor de tareas de nivel medio: el traductor lógico
El plan simbólico generado por el LLM es luego procesado por un gestor de tareas de nivel medio. Esta capa actúa como un traductor y supervisor, convirtiendo las acciones simbólicas en una secuencia de tareas verificables. Por ejemplo, antes de ejecutar la acción inspeccionar(área), este módulo valida que se cumplan precondiciones lógicas, como que el ROV haya llegado a la posición correcta (navegado(rov)). Este paso es crucial para evitar errores de ejecución y asegurar que la misión se desarrolle de manera ordenada y robusta.
El control de movimiento de bajo nivel: la ejecución precisa
Finalmente, la capa de control de movimiento de bajo nivel se encarga de la ejecución física de las tareas. Utilizando datos de los sensores del ROV (cámara, IMU, etc.), este módulo calcula las trayectorias exactas y ajusta los propulsores para que el vehículo se mueva con precisión, siga la ruta de inspección planificada (por ejemplo, una trayectoria helicoidal) y mantenga la estabilidad, incluso en entornos submarinos dinámicos. Un bucle de retroalimentación en tiempo real permite corregir errores y adaptar la misión sobre la marcha si las condiciones cambian.
Validación en entornos simulados y reales: ¿es realmente superior?
Los investigadores validaron la eficacia de AquaChat a través de extensas pruebas, comparándolo con un planificador tradicional basado en reglas fijas.
Flexibilidad y comprensión del lenguaje
Los resultados fueron contundentes. El planificador basado en reglas solo podía procesar comandos estructurados y predefinidos. Cualquier variación en la redacción o un comando más ambiguo como «¿Puedes buscar agujeros en la red?» resultaba en un fallo.
En contraste, el planificador LLM de AquaChat demostró una flexibilidad y comprensión muy superiores, interpretando correctamente tanto comandos estructurados como no estructurados y generando planes de misión completos y coherentes. Aunque el LLM tardaba más en generar el plan (entre 2.7 y 47.7 segundos), su capacidad para manejar la diversidad del lenguaje humano representa una ventaja operativa inmensa.
Mantente siempre informado
Únete a nuestras comunidades para recibir al instante las noticias, informes y análisis más importantes del sector acuícola.
En las pruebas de simulación, el ROV guiado por AquaChat siguió las trayectorias de inspección (tanto de movimiento directo como espirales complejas) con un error mínimo, demostrando la eficacia del sistema de control de bajo nivel para ejecutar los planes generados por la IA.
Además, se realizaron experimentos en un entorno de piscina controlado con un ROV comercial (Blueye Pro ROV X). Al asignarle una trayectoria de inspección en zigzag, el ROV logró seguir los puntos de referencia de profundidad con gran precisión, validando la aplicabilidad del sistema en una plataforma física real.
Implicaciones para el futuro de la acuicultura
AquaChat no es solo un proyecto de investigación; es un vistazo al futuro de la gestión acuícola. Al hacer que la interacción con la robótica marina sea tan simple como dar una instrucción verbal, esta tecnología tiene el potencial de:
- Aumentar la eficiencia operativa: Reduce el tiempo y la complejidad de la planificación de misiones de inspección.
- Mejorar la precisión y la calidad de los datos: Asegura una cobertura sistemática y completa de las redes, lo que lleva a una mejor detección de problemas.
- Democratizar el uso de la tecnología: Disminuye la curva de aprendizaje para los operadores de ROVs, permitiendo que más personal realice inspecciones de alto nivel sin necesidad de formación en programación.
El desarrollo de sistemas como AquaChat marca un paso fundamental hacia operaciones de acuicultura más autónomas, sostenibles e inteligentes, sentando las bases para la próxima generación de herramientas de gestión en la industria.
Contacto
Irfan Hussain
Khalifa University Center for Autonomous Robotic Systems (KUCARS), Khalifa University
United Arab Emirates
Email: irfan.hussain@ku.ac.ae
Referencia
Akram, W., Din, M. U., Saad, A., & Hussain, I. (2025). AquaChat: An LLM-guided ROV framework for adaptive inspection of aquaculture net pens. Aquacultural Engineering, 111, 102607. https://doi.org/10.1016/j.aquaeng.2025.102607
Editor de la revista digital AquaHoy. Biólogo Acuicultor titulado por la Universidad Nacional del Santa (UNS) y Máster en Gestión de la Ciencia y la Innovación por la Universidad Politécnica de Valencia, con diplomados en Innovación Empresarial y Gestión de la Innovación. Posee amplia experiencia en el sector acuícola y pesquero, habiendo liderado la Unidad de Innovación en Pesca del Programa Nacional de Innovación en Pesca y Acuicultura (PNIPA). Ha sido consultor senior en vigilancia tecnológica, formulador y asesor de proyectos de innovación, y docente en la UNS. Es miembro del Colegio de Biólogos del Perú y ha sido reconocido por la World Aquaculture Society (WAS) en 2016 por su aporte a la acuicultura.

: Tecnología, Diseño y Rentabilidad")






